Using an Environment
Initializing
If the gym-anm environment you would like to use has already been registered in the gymnasium’s registry, you can initialize it with
gym.make('gym_anm:<ENV_ID>'), where <ENV_ID> it the ID of the environment. For example:
import gymnasium as gym
env = gym.make('gym_anm:ANM6Easy-v0')
Note: all environments provided as part of the gym-anm package are automatically registered.
Alternatively, the environment can be initialized directly from its class:
from gym_anm.envs import ANM6Easy
env = ANM6Easy()
Agent-environment interactions
Built on top of Gymnasium, gym-anm provides 2 core functions: reset() and
step(a).
reset() can be used to reset the environment and collect the first observation of the trajectory:
obs, _ = env.reset(seed=...)
After the agent has selected an action a to apply to the environment, step(a) can be used to do so:
obs, r, terminated, _, info = env.step(a)
where:
obsis the vector of observations \(o_{t+1}\),ris the reward \(r_t\),terminatedis a boolean value set totrueif \(s_{t+1}\) is a terminal state,infogathers information about the transition (it is seldom used ingym-anm).
Render the environment
Some gym-anm environments may support rendering through the render() and close() functions.
To update the visualization of the environment, the render method is called:
env.render()
To end the visualization and close all used resources:
env.close()
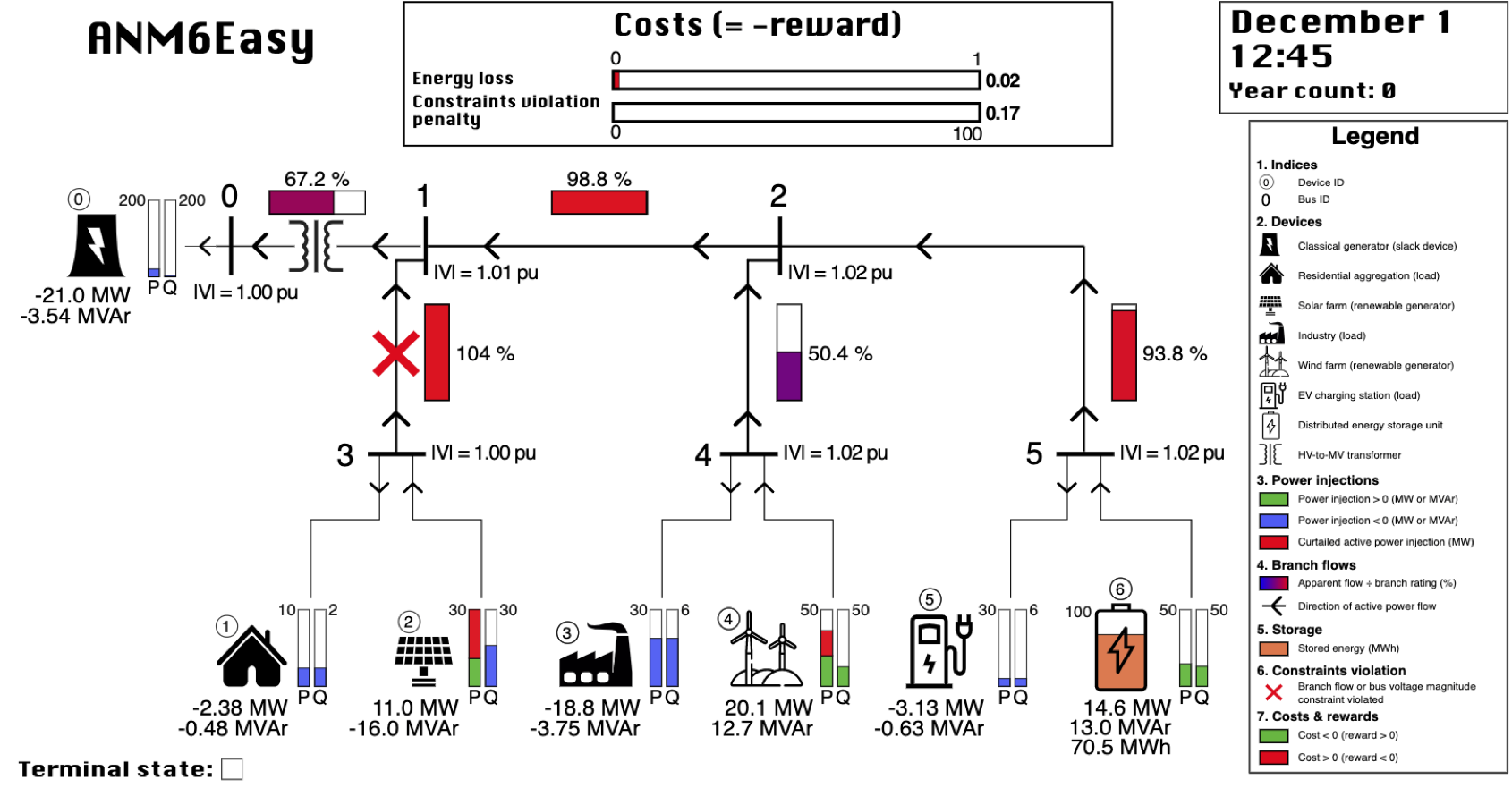
Currently, only gym-anm:ANM6Easy-v0 supports rendering.
Complete example
A complete example of agent-environment interactions with an arbitrary agent agent:
env = gym.make('gym_anm:ANM6Easy-v0')
o, _ = env.reset()
for i in range(1000):
a = agent.act(o)
o, r, terminated, _, info = env.step(a)
env.render()
time.sleep(0.5) # otherwise the rendering is too fast for the human eye
if done:
o, _ = env.reset()
The above example would be rendered in your favorite web browser as: